Optimizations#
This page contains information and guidelines for improving the reliability, flexibility and stability of your JupyterHub deployment. Many of the settings described is only purposeful for a better autoscaling experience.
To summarize, for a good autoscaling experience, we recommend you to:
Enable the continuous image puller, to prepare added nodes for arriving users.
Enable pod priority and add user placeholders, to scale up nodes ahead of real users’ arrivals.
Enable the user scheduler, to pack users tight on some nodes and let other nodes become empty and scaled down.
Set up an autoscaling node pool and dedicate it to user pods by tainting the node and requiring user pods, which tolerate the nodes’ taint, to schedule on these nodes. This way, only user pods can then block scale down.
Set appropriate user resource requests and limits, to allow a reasonable amount of users to share a node.
A reasonable final configuration for efficient autoscaling could look something like this:
scheduling:
userScheduler:
enabled: true
podPriority:
enabled: true
userPlaceholder:
enabled: true
replicas: 4
userPods:
nodeAffinity:
matchNodePurpose: require
cull:
enabled: true
timeout: 3600
every: 300
# The resources requested is very important to consider in
# relation to your machine type. If you have a n1-highmem-4 node
# on Google Cloud for example you get 4 cores and 26 GB of
# memory. With the configuration below you would be able to have
# at most about 50 users per node. This can be reasonable, but it
# may not be, it will depend on your users. Are they mostly
# writing and reading or are they mostly executing code?
singleuser:
cpu:
limit: 4
guarantee: 0.05
memory:
limit: 4G
guarantee: 512M
Pulling images before users arrive#
If a user pod is scheduled on a node requesting a Docker image that isn’t already pulled onto that node, the user will have to wait for it. If the image is large, the wait can be 5 to 10 minutes. This commonly occurs in two situations:
A new single-user image is introduced (
helm upgrade)With the hook-image-puller enabled (the default), the user images being introduced will be pulled to the nodes before the hub pod is updated to utilize the new image. The name hook-image-puller is a technical name referring to how a Helm hook is used to accomplish this, a more informative name would have been pre-upgrade-image-puller.
NOTE: With this enabled your
helm upgradewill take a long time if you introduce a new image as it will wait for the pulling to complete. We recommend that you add--timeout 10m0sor similar to yourhelm upgradecommand to give it enough time.The hook-image-puller is enabled by default. To disable it, use the following snippet in your
config.yaml:prePuller: hook: enabled: false
A node is added (Cluster Autoscaler)
The amount of nodes in a Kubernetes cluster can increase, either by manually scaling up the cluster size or by a cluster autoscaler. As new nodes will come fresh without any images on their disks, a user pod arriving to this node will be forced to wait while the image is pulled.
With the continuous-image-puller enabled (enabled by default), the user’s container image will be pulled when a new node is added. New nodes can for example be added manually or by a cluster autoscaler. The continuous image-puller uses a daemonset to force Kubernetes to pull the user image on all nodes as soon as a node is present.
The continuous-image-puller is enabled by default. To disable it, use the following snippet in your
config.yaml:prePuller: continuous: # NOTE: if used with a Cluster Autoscaler, also add user-placeholders enabled: false
It is important to realize that if the continuous-image-puller together with a Cluster Autoscaler (CA) won’t guarantee a reduced wait time for users. It only helps if the CA scales up before real users arrive, but the CA will generally fail to do so. This is because it will only add a node if one or more pods won’t fit on the current nodes but would fit more if a node is added, but at that point users are already waiting. To scale up nodes ahead of time we can use user-placeholders.
The images that will be pulled#
The hook-image-puller and the continuous-image-puller has various sources
influencing what images they will pull, as it does in order to prepare nodes
ahead of time that may need images. These sources are all found in the values
provided with the Helm chart (that can be overridden with config.yaml) under
the following paths:
Relevant image sources#
singleuser.imagesingleuser.profileList[].kubespawner_override.imagesingleuser.extraContainers[].imageprePuller.extraImages.someName
Additional sources#
singleuser.networkTools.imageprePuller.pause.image
For example, with the following configuration, three images would be pulled by the image pullers in order to prepare the nodes that may end up using these images.
singleuser:
image:
name: jupyter/minimal-notebook
tag: 2343e33dec46
profileList:
- display_name: "Minimal environment"
description: "To avoid too much bells and whistles: Python."
default: true
- display_name: "Datascience environment"
description: "If you want the additional bells and whistles: Python, R, and Julia."
kubespawner_override:
image: jupyter/datascience-notebook:2343e33dec46
prePuller:
extraImages:
my-other-image-i-want-pulled:
name: jupyter/all-spark-notebook
tag: 2343e33dec46
Efficient Cluster Autoscaling#
A Cluster Autoscaler (CA) will help you add and remove nodes from the cluster. But the CA needs some help to function well. Without help, it will both fail to scale up before users arrive and scale down nodes aggressively enough without disrupting users.
Scaling up in time (user placeholders)#
A Cluster Autoscaler (CA) will add nodes when pods don’t fit on available nodes but would fit if another node is added. But, this may lead to a long waiting time for the pod, and as a pod can represent a user, it can lead to a long waiting time for a user. There are now options to address this.
With Kubernetes 1.11+ (that requires Helm 2.11+), Pod Priority and Preemption was introduced. This allows pods with higher priority to preempt / evict pods with lower priority if that would help the higher priority pod fit on a node.
This priority mechanism allows us to add dummy users or user-placeholders with low priority that can take up resources until a real user with (higher priority) requires it. At this time, the lower priority pod will get preempted to make room for the high priority pod. This now evicted user-placeholder will now be able to signal to the CA that it needs to scale up.
The user placeholders will have the same resources requests/limits as the Helm
chart is configured under singleuser.cpu and singleuser.memory. This means
that if you have three user placeholders running, real users will only need to
wait for a scale up if more than three users arrive in an interval of time less
than it takes to make a node ready for use, assuming these users didn’t spawn
with adjusted resource requests as specified in singleuser.profileList.
To use three user placeholders for example, that can do their job thanks to pod priority, add the following configuration:
scheduling:
podPriority:
enabled: true
userPlaceholder:
# Specify three dummy user pods will be used as placeholders
replicas: 3
For further discussion about user placeholders, see @MinRK’s excellent post where he analyzed its introduction on mybinder.org.
Important
Further settings may be required for successful use of the pod priority depending on how your cluster autoscaler is configured. This is known to work on GKE, but we don’t know how it works on other cloud providers or kubernetes. See the configuration reference for more details.
Scaling down efficiently#
Scaling up is the easy part, scaling down is harder. To scale down a node, certain technical criteria need to be met. The central one is in order for a node to be scaled down, it must be free from pods that aren’t allowed to be disrupted. Pods that are not allowed to be disrupted are, for example, real user pods, important system pods, and some JupyterHub pods (without a permissive PodDisruptionBudget). Consider for example that many users arrive to your JupyterHub during the daytime. New nodes are added by the CA. Some system pod ends up on the new nodes along with the user pods for some reason. At night when the culler has removed many inactive pods from some nodes. They are now free from user pods but there is still a single system pod stopping the CA from removing the node.
To avoid these scale down failures, we recommend using a dedicated node pool for the user pods. That way, all the important system pods will run at one or a limited set of nodes, so the autoscaling user nodes can scale from 0 to X and back from X to 0.
This section about scaling down efficiently, will also explains how the user scheduler can help you reduce the failures to scale down due to blocking user pods.
Using a dedicated node pool for users#
To set up a dedicated node pool for user pods, we can use taints and tolerations. If we add a taint to all the nodes in the node pool, and a toleration on the user pods to tolerate being scheduled on a tainted node, we have practically dedicated the node pool to be used only by user pods.
To make user pods schedule on a dedicated node for them, you need to do the following:
Setup a node pool (with autoscaling), a certain label, and a certain taint.
If you need help on how to do this, please refer to your cloud providers documentation. A node pool may be called a node group.
The label:
hub.jupyter.org/node-purpose=userNOTE: Cloud providers often have their own labels, separate from kubernetes labels, but this label must be a kubernetes label.
The taint:
hub.jupyter.org/dedicated=user:NoScheduleNOTE: You may need to replace
/with_due cloud provider limitations. Both taints are tolerated by the user pods.
Make user pods require to be scheduled on the node pool setup above
If you don’t require the user pods to schedule on their dedicated node, you may fill up the nodes where the other software runs. This can cause a
helm upgradecommand to fail. For example, you may have run out of resources for non-user pods that cannot schedule on the autoscaling node pool as they need during a rolling update.The default setting is to make user pods prefer to be scheduled on nodes with the
hub.jupyter.org/node-purpose=userlabel, but you can also make it required using the configuration below.scheduling: userPods: nodeAffinity: # matchNodePurpose valid options: # - ignore # - prefer (the default) # - require matchNodePurpose: require
NOTE: If you end up not using a dedicated node pool for users and want to scale down efficiently, you will need to learn about PodDisruptionBudget resources and do quite a bit more work in order to avoid ending up with almost empty nodes not scaling down.
Disabling default tolerations#
Some clusters may have a PodTolerationRestriction admission-controller running that will block Kubernetes objects that include tolerations outside of a specified whitelist. If your cluster has this controller running and you cannot update it to include the hub.jupyter.org/dedicated / _dedicated tolerations, then you can disable those across all the chart’s pods by setting scheduling.corePods.tolerations and scheduling.userPods.tolerations to an empty list.
Using available nodes efficiently (the user scheduler)#
If you have users starting new servers while the total number of active users decreasing, how will you free up a node so it can be scaled down?
This is what the user scheduler helps you with. The user scheduler’s only task is to schedule new user pods to the most utilized node. This can be compared to the default scheduler that instead always tries to schedule pods so the least utilized node. Only the user scheduler would allow the underutilized nodes to free up over time as the total amount of users decrease but a few users still arrive.
NOTE: If you don’t want to scale down the nodes you have, it would make more sense to let the users spread out and utilize all available nodes. Only activate the user scheduler if you have an autoscaling node pool.
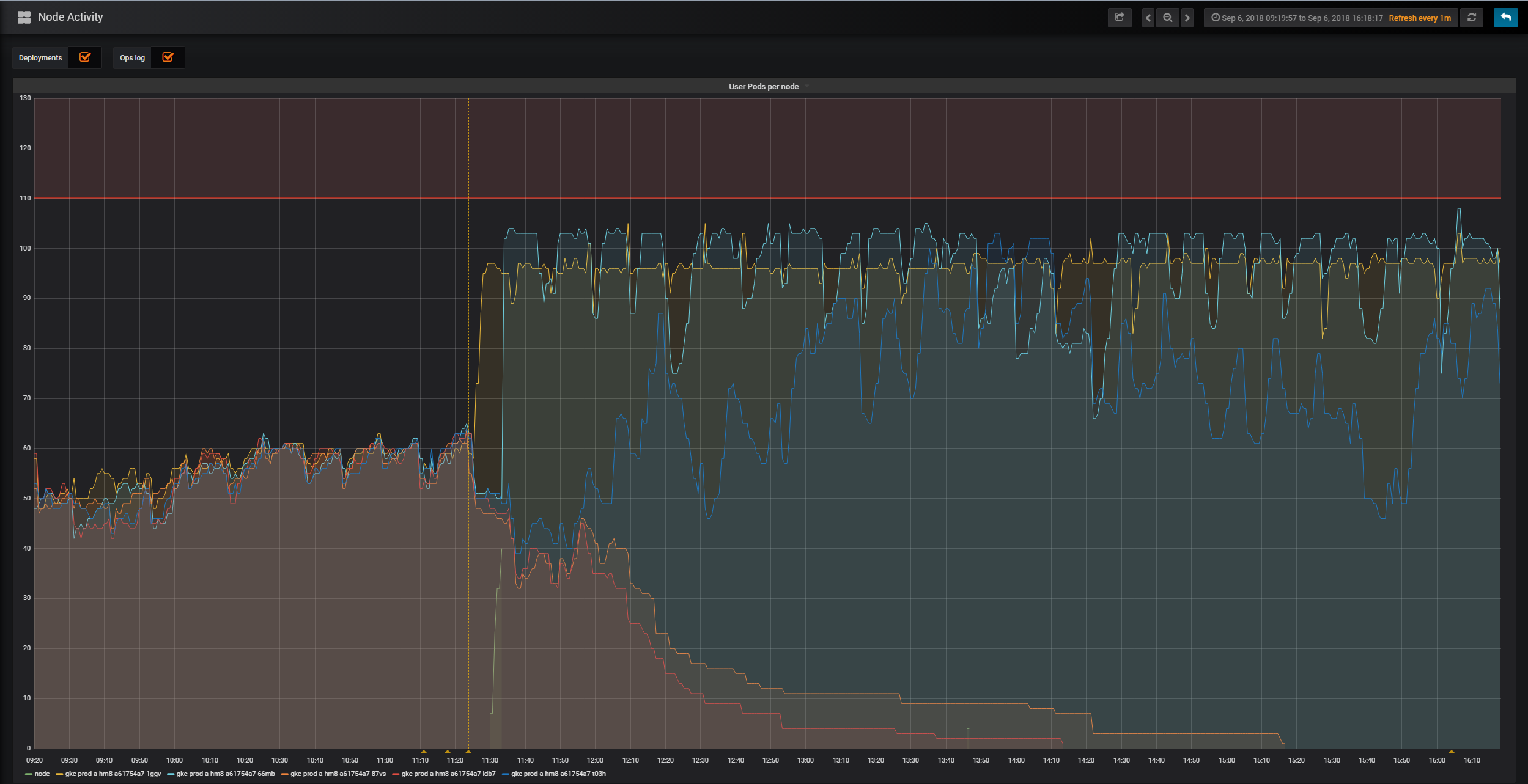
To see the user scheduler in action, look at the following graph from the mybinder.org deployment. The graph is from when the user scheduler was enabled for the first time, it is showing the amount of user pods active on five different nodes. When the user scheduler was enabled, two nodes were in time freed up from user pods and scaled down.
To enable the user scheduler:
scheduling:
userScheduler:
enabled: true
NOTE: For the user scheduler to work well, you need old user pods to shut down at some point. Make sure to properly configure the culler.
Balancing “guaranteed” vs “maximum” memory and CPU#
You have the ability to choose a “guarantee” and a “limit” for both memory and CPU available to users. This allows you to make a more efficient use of your cloud resources, but how do you choose the right “ratio” of “guaranteed / limit”? Here is an example scenario to help you decide a strategy.
Consider a JupyterHub with 100G of RAM per node. Users of the hub are expected to occasionally use 20G each, so you begin by giving each of them a guarantee of 20G of RAM. This means that any time a user starts their session, 20G of RAM on the node is reserved for them. Each node can fit 5 users (100G / 20G per user = 5 users).
However, you notice that in practice, most users have just 1G of RAM being used, and very occasionally use the full 20G. This means that your hub often has 80 to 90G of RAM reserved but not used. You are paying for resources that you don’t usually need.
Using resource limits and guarantees, you can use your cloud resources more efficiently. Resource limits define a maximum, while resource guarantees define a minimum.
The ratio of these two numbers is the limit to guarantee ratio.
In the above case, your limit to guarantee ratio is 1:1.
If you set a guarantee of 1GB and a limit of 20GB then you have a limit to guarantee ratio of 20:1.
Your node will fit many more users on average.
When a user starts a session, if there is at least 1GB of RAM available on the node then their session will start there.
If not, a new node will be created (and your costs just went up).
However, say there are now 50 users on this node.
Technically, it is still well under the node’s maximum allowed number, since each user only has a guarantee of 1G RAM and we have 100G total.
If 10 of those users suddenly load in a 10GB dataset, we’ve now requested (10 * 10GB) + (40 * 1GB) = 140GB used RAM.
Uh oh, we are now well over the 100GB limit, and user sessions will start crashing.
This is what happens when your limit to guarantee ratio is too big.
The problem? Your user’s behavior was not the right fit for your limit to guarantee ratio. You should increase the guaranteed amount of RAM for each user, so that in general fewer users will be on a given node, and they are less-likely to saturate that node’s memory by asking for RAM all at once.
Choosing the right limit to guarantee ratio ratio is an art, not a science. We suggest starting with a ratio of 2 to 1 and adjusting from there based on whether you run into problems on your hub. For example, if the limit is 10GB, start with a guarantee of 5GB. Use a service such as Prometheus + Grafana to monitor the memory usage over time, and use this to decide whether to adjust your ratio.
Explicit memory and CPU allocated to core pods’ containers#
The Helm chart creates several k8s Pods that typically have one container running in them, but sometimes more. In this section you are guided on how to explicitly specify how much CPU and memory they are guaranteed via requests and how much CPU and memory they are limited to via limits.
To complement this text, see a related section in the Kubernetes documentation.
To decide what requests and limits to set, some background knowledge is relevant:
Resource requests guarantees a minimal level of resources for a container to do its job, and resource limits declares an upper bound.
A LimitRange resource in a namespace can provide defaults to containers without explicitly set requests and/or limits.
Make sure to check the namespace where you deploy JupyterHub for such resource by doing
kubectl get limitrange --namespace <k8s-namespace>.If you set resource limits but omit resource requests, then k8s will assume you imply the same resource requests as your limits. No assumptions are made in the other direction.
Containers competing for additional CPU beyond their requests will do so with a strength relative to their request. If two containers with 0.1 and 0.4 CPU resource requests compete for CPU on a 1 CPU node, one will get 0.2 and the other 0.8.
Over-subscribing CPU results in things being slower than they could be, but usually this is not catastrophic, while over-subscribing memory results in a containers process is terminated by the Out Of Memory Killer (OOMKiller).
The same actually goes for under-provisioning: low limits on CPU means things might be slow, while low limits on memory means things will keep getting killed.
A container running out of memory will get its process killed by a Linux Out Of Memory Killer (OOMKiller). When this happens you should see a trace of it by using
kubectl describe pod --namespace <k8s-namespace> <k8s-pod-name>andkubectl logs --previous --namespace <k8s-namespace> <k8s-pod-name>.When a container’s process has been killed, the container will restart if the container’s
restartPolicyallows it, and otherwise the pod will be evicted.A container entirely starved of CPU could act up in many unique ways and is harder to debug. Various timeouts can be clues to suspect CPU starvation.
When scheduling a Pod on a node, the effective requests/limits are considered. As a Pod’s init containers are run in sequence before the Pod’s main containers are started, the effective requests/limits are calculated as the highest of the init containers requests/limits and the sum of the main containers requests/limits.
Software may not be able to make use of more than 1 CPU because it doesn’t support running code concurrently across multiple CPU cores. The
hubpod running JupyterHub in Python and theproxypod running ConfigurableHTTPProxy in NodeJS are such applications.
Some additional technical details:
A container requesting
0CPU will be granted the smallest amount of CPU supported by the Kubernetes container runtime.CPU core sharing is enforced between containers in time intervals of 100 ms typically.
The management of a k8s Pod and its containers requires a small overhead CPU and memory, this will count towards the quota.
As a reference, you can compare with the CPU and memory use of JupyterHub Helm chart pods that are part of the mybinder.org deployment that runs a BinderHub, which relies on this JupyterHub Helm chart. Such information is available in mybinder.org’s Grafana dashboard.
Below are the various resource requests you can configure in this Helm chart and some notes about them.
Configuration |
pod |
cpu/memory requests before 1.0.0 |
Note |
|---|---|---|---|
hub.resources |
hub |
200m, 510Mi |
JupyterHub and KubeSpawner runs here. Can manage with small resources but could peak up to 1 CPU during very heavy load of simultaneous users starting and stopping servers. |
proxy.chp.resources |
proxy |
200m, 510Mi |
The container runs |
proxy.traefik.resources |
autohttps |
- |
The container performs TLS termination only. Will require small amounts of resources. |
proxy.secretSync.resources |
autohttps |
- |
The sidecar container is a watchdog, watching a file for changes and updates a k8s Secret with those changes. Will require minimal resources. |
scheduling.userScheduler.resources |
user-scheduler |
50m, 256Mi |
The container runs a |
scheduling.userPlaceholder.resources |
user-placeholder |
- |
This is an explicit override of the default behavior to reuse the values in |
prePuller.resources |
hook|continuous-image-puller |
0, 0 |
This pod’s containers are all running |
prePuller.hook.resources |
hook-image-awaiter |
0, 0 |
The container just polls the k8s api-server. Will require minimal resources. |
singleuser.cpu|memory.guarantee|limit |
jupyter-username |
0, 1G |
The configuration syntax is different because it is native to the Spawner base class rather than Kubernetes. It is commonly useful to guarantee a certain amount of memory rather than CPU to help users share CPU with each other. |
Example resource requests#
Here are some examples of resource requests that could be reasonable for a deployment where service reliability and performance matters but where the core pods are required to fit on a 2 CPU node.
# The ranges of CPU and memory in the comments represents the min - max values of
# resource usage for containers running in UC: Berkeley over 6 months.
hub: # hub pod, running jupyterhub/jupyterhub
resources:
requests:
cpu: 500m # 0m - 1000m
memory: 2Gi # 200Mi - 4Gi
proxy:
chp: # proxy pod, running jupyterhub/configurable-http-proxy
resources:
requests:
cpu: 500m # 0m - 1000m
memory: 256Mi # 100Mi - 600Mi
traefik: # autohttps pod (optional, running traefik/traefik)
resources:
requests:
cpu: 500m # 0m - 1000m
memory: 512Mi # 100Mi - 1.1Gi
secretSync: # autohttps pod (optional, sidecar container running small Python script)
resources:
requests:
cpu: 10m
memory: 64Mi
scheduling:
userScheduler: # user-scheduler pods (optional, running kubernetes/kube-scheduler)
resources:
requests:
cpu: 30m # 8m - 45m
memory: 512Mi # 100Mi - 1.5Gi
userPlaceholder: # user-placeholder pods (optional, running pause container)
# This is just an override of the resource requests that otherwise match
# those configured in singleuser.cpu|memory.guarantee|limit.
resources: {}
prePuller: # hook|continuous-image-puller pods (optional, running pause container)
resources:
requests:
cpu: 10m
memory: 8Mi
hook: # hook-image-awaiter pod (optional, running GoLang binary defined in images/image-awaiter)
resources:
requests:
cpu: 10m
memory: 8Mi
As these have been estimated roughly, please help us improve them by providing feedback in this GitHub issue.
Note
If you collect metrics on the resource usage of pods in your k8s cluster (Prometheus) and have dashboards showing you its usage (Grafana), you could tweak these over time.